11 Line and Surface Integrals
The change of variables theorem from Chapter 8 says that when you substitute y = g(x) in an integral, you pick up a factor of |\det Dg_x| — the local volume scaling of the map g. This factor is what makes the integral independent of which coordinates you use to compute it.
Now consider integrating over a curve or surface rather than a region. A curve \gamma : [a,b] \to \mathbb{R}^n is a map from a one-dimensional domain into \mathbb{R}^n; a surface \Phi : D \to \mathbb{R}^n maps a two-dimensional domain in. In both cases the natural integral should not depend on the parametrisation — on how fast we traverse the curve, or how we tile the surface with the parameter grid. By the same logic as Chapter 8, the integrand must be weighted by the local stretching factor of the map. For a curve this is \|\gamma'(t)\|, the speed. For a surface it is \sqrt{\det(D\Phi^T D\Phi)}, the square root of the determinant of the Gram matrix. Both are instances of the same principle: pull back to parameter space and correct for the distortion.
The Gram matrix G = D\Phi^T D\Phi is the matrix of inner products of the tangent vectors to the image. When \Phi is a curve, G is 1 \times 1 and \sqrt{\det G} = \|\gamma'\|. When \Phi is a surface, G is 2 \times 2 and \sqrt{\det G} is the area of the parallelogram spanned by the two tangent vectors. When \Phi : \mathbb{R}^n \to \mathbb{R}^n is a diffeomorphism, G = D\Phi^T D\Phi and \sqrt{\det G} = |\det D\Phi|, recovering exactly the change of variables factor. The Gram matrix unifies arc length, surface area, and the change of variables formula into one object.
11.1 Parametrised Curves and Arc Length
A smooth curve \gamma : [a,b] \to \mathbb{R}^n has derivative \gamma'(t) \in \mathbb{R}^n at each t. This is an n \times 1 matrix, and the Gram matrix is the 1 \times 1 matrix G_\gamma(t) = \gamma'(t)^T \gamma'(t) = \|\gamma'(t)\|^2. So \sqrt{\det G_\gamma} = \|\gamma'(t)\| — the speed of \gamma.
Definition 11.1 (Arc length) The arc length of a C^1 curve \gamma : [a,b] \to \mathbb{R}^n is \ell(\gamma) = \int_a^b \sqrt{\det G_\gamma(t)}\, dt = \int_a^b \|\gamma'(t)\|\, dt. A curve is regular if \gamma'(t) \neq 0 for all t.
Arc length is independent of parametrisation. If \tilde\gamma = \gamma \circ \phi for a smooth increasing \phi : [c,d] \to [a,b], then \|\tilde\gamma'(s)\| = \|\gamma'(\phi(s))\|\phi'(s) and the substitution rule gives \ell(\tilde\gamma) = \ell(\gamma). It is a property of the image, not the speed of traversal.
For a regular curve, the arc length function s(t) = \int_a^t \|\gamma'(u)\|\, du satisfies s'(t) = \|\gamma'(t)\| > 0, so s is a diffeomorphism onto [0, \ell(\gamma)] and the inverse reparametrises \gamma by arc length: \|\tilde\gamma'(s)\| = 1 everywhere. Arc length parametrisation is canonical — it removes the arbitrary speed and leaves only the geometry.
11.2 Line Integrals
11.2.1 Scalar line integrals
If f : U \to \mathbb{R} is a scalar field and \gamma is a curve in U, the natural integral of f over \gamma should weight each point by how much curve passes through it — by the arc length element ds = \|\gamma'(t)\|\, dt, not by dt alone. A faster parametrisation covers the same geometry in less time; without the speed correction we would undercount.
Definition 11.2 (Scalar line integral) The scalar line integral of f along \gamma : [a,b] \to U is \int_\gamma f\, ds = \int_a^b f(\gamma(t))\, \|\gamma'(t)\|\, dt.
When f \equiv 1 this is \ell(\gamma). When f is a mass density per unit length, \int_\gamma f\, ds is the total mass of the wire. The integral is independent of orientation-preserving reparametrisation.
Example. A helix \gamma(t) = (\cos t, \sin t, t) for t \in [0, 2\pi] has \|\gamma'(t)\| = \sqrt{2}. The mass of a wire of density \rho along one full turn is \sqrt{2}\int_0^{2\pi} \rho(\gamma(t))\, dt; for constant \rho = 1 this is 2\pi\sqrt{2}, the arc length.
11.2.2 Vector line integrals
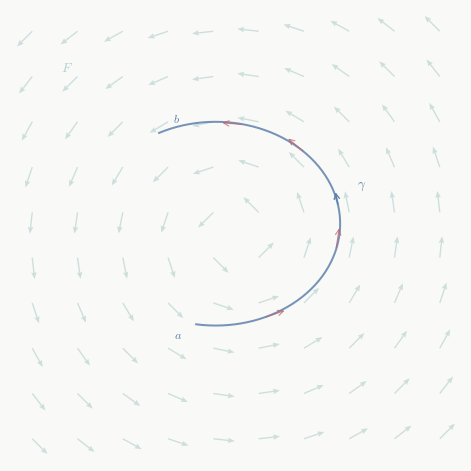
When F : U \to \mathbb{R}^n is a vector field, the natural integral along \gamma measures how much F pushes along the curve. A force field F does work F(x) \cdot dx on an infinitesimal displacement dx; the total work along \gamma is the integral of this.
Definition 11.3 (Vector line integral) The vector line integral of F along \gamma : [a,b] \to U is \int_\gamma F \cdot d\gamma = \int_a^b F(\gamma(t)) \cdot \gamma'(t)\, dt.
The integrand F(\gamma(t)) \cdot \gamma'(t) is the tangential component of F, weighted by speed. Under an orientation-preserving reparametrisation the integral is unchanged; under an orientation-reversing one it changes sign. Work done traversing a path in one direction is the negative of the work done in the other.
The two kinds of line integral are related: writing \hat T = \gamma' / \|\gamma'\| for the unit tangent, \int_\gamma F \cdot d\gamma = \int_\gamma (F \cdot \hat T)\, ds, so the vector integral is the scalar integral of the tangential component of F.
11.3 The Fundamental Theorem for Line Integrals
The fundamental theorem of calculus says \int_a^b g'(t)\, dt = g(b) - g(a). The multivariable analogue replaces g' with the gradient and the interval with a path — and the proof is the same two lines.
Theorem 11.1 (Path independence and potentials) Let F : U \to \mathbb{R}^n be continuous on a connected open set U. The following are equivalent:
- F = \nabla f for some f \in C^1(U)
- \int_\gamma F \cdot d\gamma depends only on the endpoints of \gamma
- \oint_\gamma F \cdot d\gamma = 0 for every closed C^1 curve in U
Proof. (i)\Rightarrow(ii): if F = \nabla f, the chain rule gives (f \circ \gamma)' = \nabla f(\gamma) \cdot \gamma', so \int_\gamma F \cdot d\gamma = \int_a^b (f \circ \gamma)'(t)\, dt = f(\gamma(b)) - f(\gamma(a)). This depends only on the endpoints — the fundamental theorem of calculus, transported to line integrals via the chain rule.
(ii)\Leftrightarrow(iii): a closed curve has equal endpoints, so path-independence gives zero. Conversely, two paths with the same endpoints form a closed curve on concatenation, and if every closed integral is zero the two path integrals must agree.
(ii)\Rightarrow(i): fix a basepoint x_0 \in U and define f(x) = \int_{\gamma_{x_0 x}} F \cdot d\gamma for any path from x_0 to x. Path-independence makes this well-defined. The limit \frac{f(x + te_j) - f(x)}{t} = \frac{1}{t}\int_x^{x+te_j} F \cdot d\gamma \to F_j(x) \quad \text{as } t \to 0 gives \partial_j f = F_j, so \nabla f = F. \square
The proof of (i)\Rightarrow(ii) is perhaps the clearest possible illustration of why the chain rule and the fundamental theorem are the same idea at different levels. In one variable, (g \circ \phi)' = g'(\phi)\phi' and \int g'(\phi)\phi'\, dt = g(\phi(b)) - g(\phi(a)). Here we have (f \circ \gamma)' = \nabla f(\gamma) \cdot \gamma' and exactly the same one-dimensional integration closes the argument.
NoteHistorical context
The connection between path integrals and potential functions was central to mechanics long before it was formalised. Lagrange and Euler understood in the 18th century that a force derivable from a potential is conservative — that the work done depends only on the endpoints. But the general theorem above, and in particular the role of the topology of the domain in obstructing the converse, was not fully understood until the 19th century.
Green’s theorem (1828), which relates a line integral around a closed curve to a double integral over the enclosed region, was the first result to make the connection between boundary integrals and interior integrals explicit. Stokes and Kelvin generalised it; Riemann understood, in the context of complex analysis, that the existence of a potential on a domain depends on its topology — specifically on whether every closed curve can be contracted to a point. This is simply-connectedness, the condition that makes (iii)\Rightarrow(i) above hold without the curl-free hypothesis.
Poincaré formalised the topological obstruction in the 1890s, and Cartan’s theory of differential forms in the early 20th century gave the unified language in which all of these results are instances of d^2 = 0: the exterior derivative applied twice is zero, and this single algebraic fact encodes the chain \operatorname{curl}\circ\nabla = 0, \operatorname{div}\circ\operatorname{curl} = 0, the fundamental theorem for line integrals, Green, Stokes, and the divergence theorem all at once.
11.4 Parametrised Surfaces and the Gram Matrix
Definition 11.4 (Parametrised surface) A parametrised surface is a C^1 map \Phi : D \to \mathbb{R}^n where D \subset \mathbb{R}^2 is a compact domain. It is regular if the columns \partial_1\Phi(u) and \partial_2\Phi(u) of D\Phi_u are linearly independent for all u \in D.
The derivative D\Phi_u is an n \times 2 matrix with columns \partial_1\Phi and \partial_2\Phi — the tangent vectors to the surface at \Phi(u). The Gram matrix is G_\Phi(u) = D\Phi_u^T D\Phi_u = \begin{pmatrix} |\partial_1\Phi|^2 & \partial_1\Phi \cdot \partial_2\Phi \\ \partial_1\Phi \cdot \partial_2\Phi & |\partial_2\Phi|^2 \end{pmatrix}, a 2 \times 2 symmetric positive definite matrix when \Phi is regular. Its determinant \det G_\Phi = |\partial_1\Phi|^2 |\partial_2\Phi|^2 - (\partial_1\Phi \cdot \partial_2\Phi)^2 is the squared area of the parallelogram spanned by the two tangent vectors, by the geometric identity |u|^2|v|^2 - (u \cdot v)^2 = |u \times v|^2 in \mathbb{R}^3, or more generally by the Cauchy–Binet formula in \mathbb{R}^n. So \sqrt{\det G_\Phi(u)} is the local area-scaling factor of \Phi at u.
Definition 11.5 (Surface area and surface integral) The surface area of \Phi : D \to \mathbb{R}^n is \operatorname{Area}(\Phi) = \int_D \sqrt{\det G_\Phi(u)}\, du. More generally, the scalar surface integral of f : U \to \mathbb{R} is \int_\Phi f\, dS = \int_D f(\Phi(u))\, \sqrt{\det G_\Phi(u)}\, du.
The integral is independent of orientation-preserving reparametrisation: changing u = \phi(v) multiplies D\Phi on the right by D\phi, so \det G acquires a factor of (\det D\phi)^2, which exactly cancels with the change of variables factor |\det D\phi| in du (with a square root).
Remark on the cross product. When n = 3, the identity |u|^2|v|^2 - (u \cdot v)^2 = \|u \times v\|^2 gives \sqrt{\det G_\Phi} = \|\partial_1\Phi \times \partial_2\Phi\|. So the cross product formula for surface area is a consequence of the Gram matrix formula, not an independent definition. The Gram matrix is the right object in all dimensions; the cross product is a shortcut that happens to work only in \mathbb{R}^3.
Example: area of S^2(R). With \Phi(\varphi, \theta) = R(\sin\varphi \cos\theta, \sin\varphi\sin\theta, \cos\varphi) on (0,\pi) \times (0, 2\pi), the tangent vectors are orthogonal with |\partial_\varphi\Phi| = R and |\partial_\theta\Phi| = R\sin\varphi, so G_\Phi = \operatorname{diag} (R^2, R^2\sin^2\varphi) and \sqrt{\det G_\Phi} = R^2\sin\varphi. Therefore \operatorname{Area}(S^2(R)) = \int_0^\pi\int_0^{2\pi} R^2\sin\varphi\, d\theta\, d\varphi = 4\pi R^2.
11.5 Flux Integrals
For a vector field F : U \to \mathbb{R}^3, the flux through a surface \Phi measures the normal component of F — how much of F passes through the surface rather than along it.
Definition 11.6 (Flux integral) The flux of F : U \to \mathbb{R}^3 through the oriented surface \Phi : D \to U is \iint_\Phi F \cdot d\mathbf{S} = \int_D F(\Phi(u)) \cdot (\partial_1\Phi \times \partial_2\Phi)\, du.
The cross product \partial_1\Phi \times \partial_2\Phi is the normal vector to the surface with magnitude \sqrt{\det G_\Phi}, so this equals \int_\Phi (F \cdot \hat n)\, dS where \hat n = (\partial_1\Phi \times \partial_2\Phi)/\sqrt{\det G_\Phi} is the unit normal. The flux is the integral of the normal component of F, weighted by area.
When F is a fluid velocity field, the flux is the volumetric flow rate through \Phi — the net volume crossing the surface per unit time in the direction of \hat n.
Example: flux of F(x) = x through S^2(R). The unit outward normal to S^2(R) is \hat n = x/R, so F \cdot \hat n = x \cdot (x/R) = R everywhere on the sphere. Therefore \iint_{S^2(R)} F \cdot d\mathbf{S} = R \cdot \operatorname{Area}(S^2(R)) = R \cdot 4\pi R^2 = 4\pi R^3.
11.6 Orientation
The flux integral requires a consistent choice of normal across the surface — an orientation. For a parametrised surface, the parametrisation provides one: \hat n = (\partial_1\Phi \times \partial_2\Phi)/\|\cdots\|. Swapping \partial_1 and \partial_2 reverses \hat n and negates the flux.
Definition 11.7 (Orientable surface) A regular surface S \subset \mathbb{R}^3 is orientable if a continuous unit normal field \hat n : S \to S^2 exists globally. An oriented surface is one with a fixed choice of \hat n.
Every surface we integrate over in this course — spheres, level sets of smooth functions, graphs of smooth functions — is orientable. The Möbius band is the canonical non-orientable example: traversing its central circle returns to the start with the normal reversed, so no consistent global choice of \hat n exists.
For a closed surface S = \partial\Omega bounding a bounded region \Omega, the canonical orientation is the outward normal — \hat n points away from \Omega. This is the convention in the Divergence theorem. For a surface with boundary, the orientation of the surface and the orientation of its boundary curve are linked by the right-hand rule: if the fingers of the right hand curl in the direction of the boundary, the thumb points in the direction of \hat n. This is the convention in Stokes’ theorem.
11.7 The General Framework
All integrals in this chapter — arc length, scalar and vector line integrals, surface area, scalar surface integrals, and flux — fit into one pattern. A k-dimensional parametrised object \Phi : D \to \mathbb{R}^n (D \subset \mathbb{R}^k) has a Gram matrix G_\Phi = D\Phi^T D\Phi, and the natural integral of a scalar field f over \Phi is \int_\Phi f = \int_D f(\Phi(u))\, \sqrt{\det G_\Phi(u)}\, du. For k = 1 and f = 1 this is arc length. For k = 2 and f = 1 it is surface area. For k = n it is the change of variables formula of Chapter 8 (where \sqrt{\det G_\Phi} = |\det D\Phi| since G_\Phi = D\Phi^T D\Phi and \det(A^T A) = (\det A)^2). The Gram matrix unifies all cases.
The flux integral for vector fields requires an additional choice — orientation — because it integrates the component of F normal to the surface, and “normal” requires a sign convention. This is the beginning of the theory of differential forms, in which orientation is built into the integration domain rather than chosen separately. The next three chapters use this framework to prove Green’s theorem, Stokes’ theorem, and the Divergence theorem — all of which relate an integral over a region to an integral over its boundary, and all of which are consequences of the single algebraic fact d^2 = 0.